
Порой желание оживить безжизненный объект пробуждается внезапно: увидел малыша, который собрал машинку из конструктора, и вдруг сам захотелось не просто собрать — оживить, вдохнуть жизнь в набор пластика и проводов. Или, быть может, хочется попробовать себя в чем-то новом, чтобы понять механику технологий изнутри, а не только со слов других энтузиастов. Именно с такого любопытства и начинается первый шаг в мир робототехники. Только представьте: еще вчера — кучка деталей, сегодня — маленький робот, который уже послушно катится по заданной траектории. Это не только адреналин творчества, но и первые навыки, которые у многих станут стартом для профессии будущего.
Почему стоит собрать простого робота своими руками
Сборка простейшего робота — отличная возможность на деле разобраться, как работает электроника, какие задачи решает контроллер, почему моторчик крутится только при правильной полярности. Это не абстрактная теория из учебника, а практическая работа, где результат зависит исключительно от вас. Именно такой подход учит ответственности за дело, вниманию к деталям и умению исправлять ошибки — это универсальные навыки.
К тому же, самостоятельная сборка простого робота может быть отличной семейной активностью. Например, один из участников форума рассказывал, как сын, вдохновившись мультфильмом, смастерил своего первого «железного друга» вместе с папой. Они не только провели время вместе, но и объяснили ребенку основы физики без скучных лекций.
Какие материалы и инструменты нужны для сборки робота
Самый «бюджетный» вариант робота не требует экзотических компонентов: многое из необходимого уже скрывается в рабочих ящиках или даже среди старых игрушек. Чтобы упростить задачу, под рукой стоит иметь:
- микроконтроллер (например, Arduino Uno или аналог);
- моторы (подойдут даже небольшие электродвигатели от старых игрушек);
- батарейный отсек или USB-питание;
- колёсики или гусеницы;
- корпус (пластиковый контейнер, детали конструктора или даже плотный картон);
- набор проводов для соединения схемы;
- простой переключатель (или сенсор препятствий, если хочется большего);
- крестовая отвёртка, ножницы, изоляционная лента.
Этот список не догма — часто детали можно заменить подручными средствами. Помню случай: энтузиаст использовал корпус от сломанной машинки, а колёса — от конструктора, и всё это держалось на скрепках и кусочках изоленты, но ведь робот поехал!
Схема простого робота: как все работает
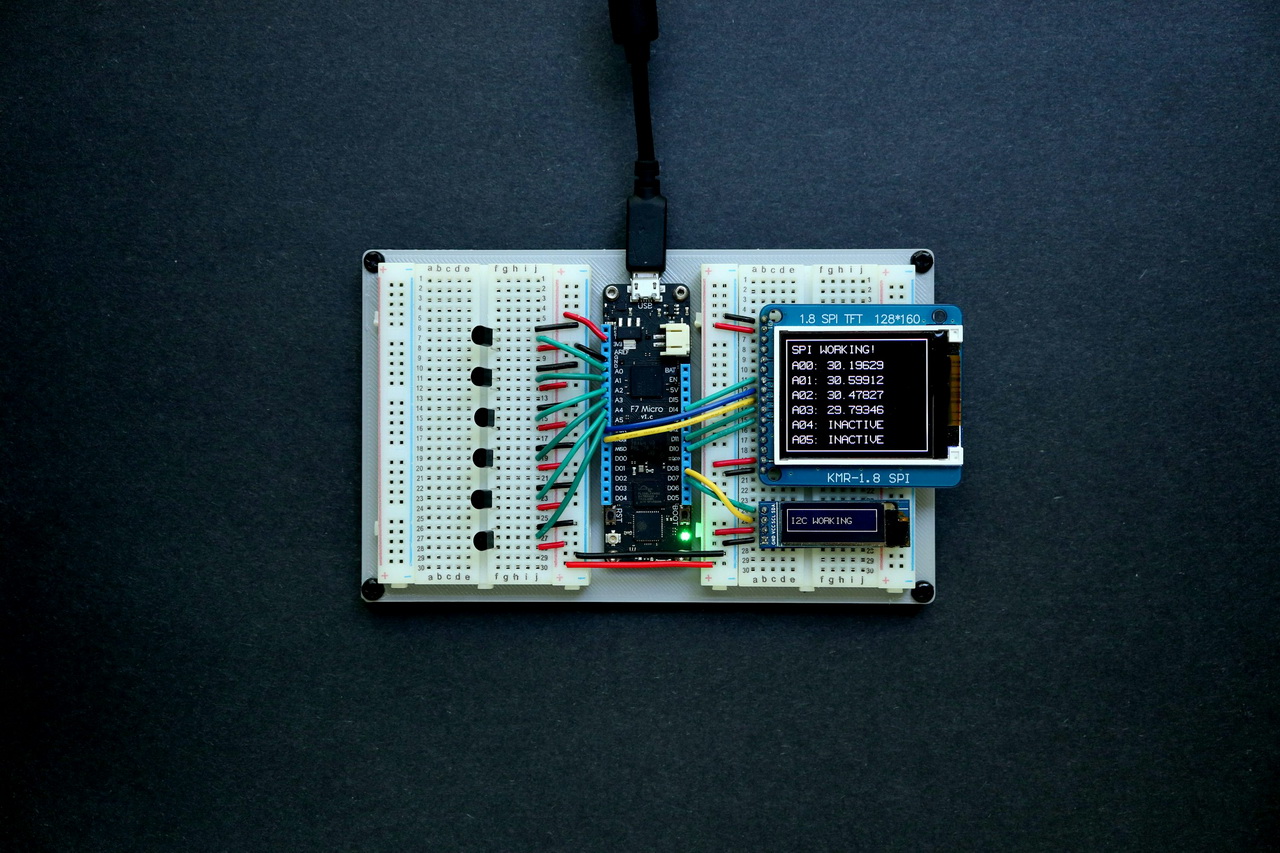
В основе большинства роботов — простая логика: микроконтроллер посылает сигнал на моторы, двигатель вращает ось, и конструкция приводится в движение. Если добавить датчик, например, на столкновение с препятствием — робот будет менять направление. Вот и вся магия.
Схема соединения компонентов выглядит примерно так:
- Контроллер подключается к батарейному отсеку.
- К контактам контроллера присоединяются моторы (через специальные драйверы или напрямую — зависит от мощности).
- Датчик (если используется) соединяется с отдельным входом контроллера.
- Все провода аккуратно изолируются.
Не стоит забывать о безопасности: порой новички пренебрегают этим пунктом и сталкиваются с коротким замыканием или перегревом компонентов.
Пошаговая инструкция: как собрать робота-миникара
Для первого опыта подойдет самый простой вариант: колесный робот-платформа, который самостоятельно едет вперед или по заданной программе.
- Сборка корпуса. Используйте коробочку, плотный пластик или детали конструктора. Главное — чтобы внутрь удобно входили аккумуляторы и контроллер.
- Установка моторов и колес. Обеспечьте надежное крепление — моторы не должны болтаться или слетать с оси.
- Подключение электропитания. Соедините батарейный отсек с контроллером, соблюдая полярность.
- Монтаж микроконтроллера. Закрепите плату внутри корпуса, проверьте, чтобы контакты не коротили на металлических частях.
- Соединение моторов. Провода от моторов подключаются к соответствующим пинам (выводам) контроллера — например, к выходам для управления двигателями.
- Добавление датчиков (опционально). На этом этапе можно установить сенсор препятствий или датчик линии.
- Тестирование схемы. Проверьте соединения, временно подайте питание, убедитесь, что моторы реагируют на сигнал.
- Программирование. Загрузите в контроллер простую программу — например, движение вперед, остановка при обнаружении препятствия.
- Финальная сборка. Зафиксируйте все элементы, аккуратно уложите провода.
Несколько советов для первого запуска:
- Перед включением обязательно проверьте все соединения — даже опытные мастера иногда забывают про короткое замыкание.
- Соблюдайте полярность при подключении питания.
- Если робот не едет, попробуйте поменять местами провода у мотора — возможно, перепутаны контакты.
Программирование простого робота: с чего начать

Заставить колёса крутиться — это только половина победы. Программная часть кажется сложнее, но на деле освоить основы робототехники может каждый. На простых платформах используются популярные языки, например, Arduino IDE на основе C++. В интернете множество библиотек и готовых примеров для создания первых проектов.
- Движение вперед — самый простой скетч. Задача — подать сигнал на оба мотора.
- Реакция на препятствие — программа, где при срабатывании датчика робот либо останавливается, либо поворачивает.
- Петля «бесконечного движения» — цикл, благодаря которому устройство самостоятельно ездит, пока не разрядится батарея.
Помните, что каждая ошибка — это не провал, а шаг к пониманию: именно методом проб и ошибок чаще всего рождаются самые интересные решения в робототехнике.
Типичные ошибки и как их избежать
Путь новичка редко бывает гладким — об этом хорошо знают все, кто когда-либо собирал свой первый проект.
- Слишком тугое крепление моторов — детали начинают клинить, колеса не вращаются.
- Перепутанные провода — мотор работает наоборот, или вообще не подаёт признаков жизни.
- Недостаточная фиксация аккумулятора — при движении робот теряет контакт и останавливается.
- Программные ошибки — в коде путаница, неправильные пины, бесконечный цикл.
Хороший способ избежать этих ловушек — вести небольшой блокнот, куда сразу записывать все шаги и возникающие проблемы. Перепроверяйте соединения после каждого этапа и не спешите прославиться на YouTube своим «грозным» роботом, пока он не пройдет обкатку в безопасных условиях.
Идеи для улучшения: куда двигаться дальше
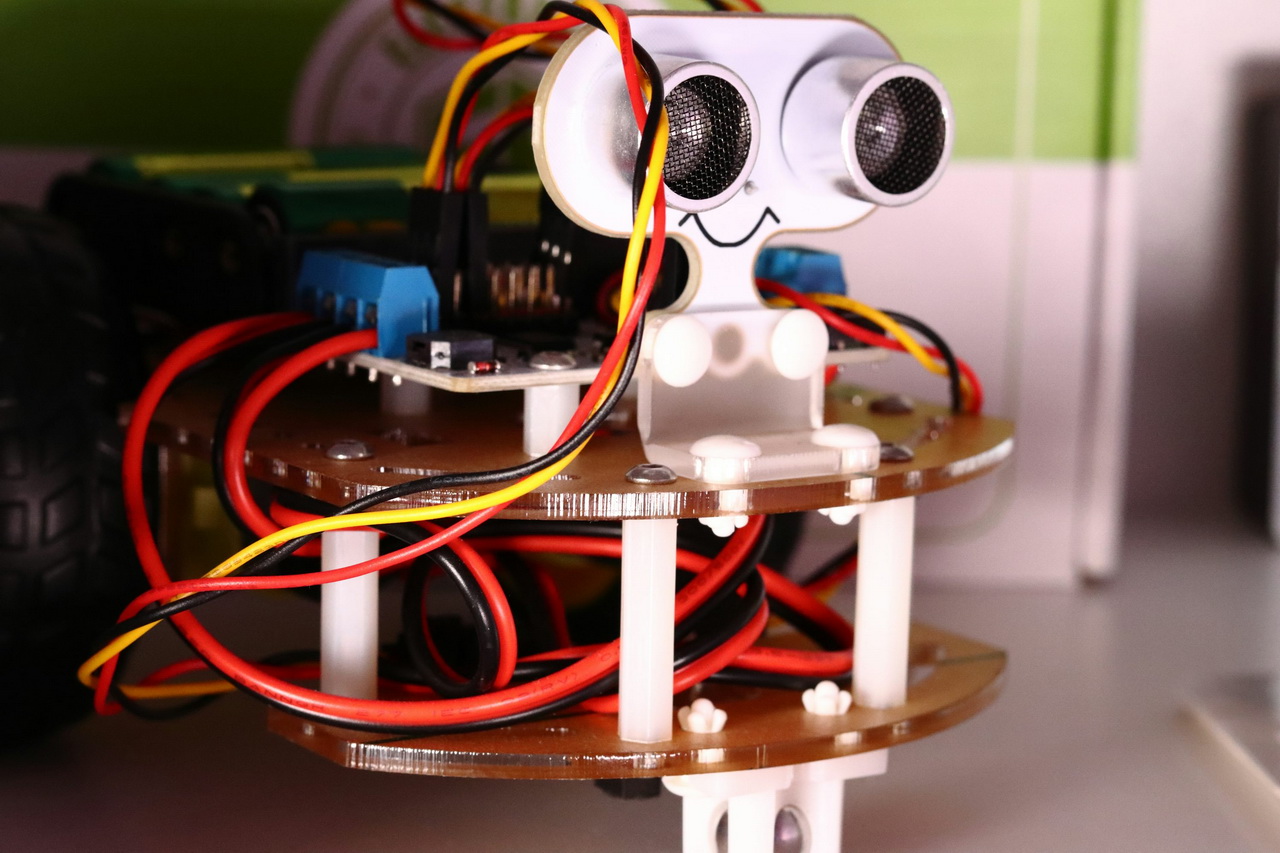
Когда мини-робот уверенно крутит колесами по комнате и слушается команд, рука так и тянется добавить что-то новое. Разнообразить проект можно по-разному:
- установить ультразвуковой датчик для объезда препятствий;
- добавить Bluetooth-модуль для управления с телефона;
- оснастить светодиодной подсветкой;
- научить следовать по линии.
Возможностей масса — фантазия ограничена только бюджетом и личным интересом. Иногда достаточно мелкой доработки, чтобы проект превратился в уникального помощника или даже соревновательного робота для участия в хобби-турнирах.
Вдохновение и еще немного мотивации
Попробуйте воспринимать сборку первого простого робота как путешествие: не важно, насколько совершенным окажется итог, гораздо ценнее те навыки, мысли и открытия, которые случатся по пути. Даже если конструкция развалится на первом повороте, это не повод опускать руки — каждый мастер начинал с нуля, и даже несчастливый опыт оборачивается неожиданным прорывом.
Порой именно банальная неудача с лопнувшей изолентой дает понимание того, как работают настоящие технологические гиганты: каждое их открытие — результат тысячи попыток и экспериментов.
Позвольте своему роботу быть несовершенным — именно такие проекты дают настоящее удовольствие от пути и открывают двери в большой мир технологий.








+ There are no comments
Add yours