
Зміст:
- З чого починати: підбір комплектуючих для Arduino-робота
- Як зібрати механіку робота на Arduino: поетапний монтаж
- Етапи механічної збірки:
- Як підключити електроніку в Arduino-роботі без стресу
- Програмування Arduino-робота: від «Hello, World» до власної логіки
- Перевірка, тестування й покращення функціоналу Arduino-робота
- Ідеї для прокачування свого Arduino-робота
- Висновок
Вступ
У кожного, хто хоч раз тримав у руках деталь конструктора LEGO або збирав з друзями модельний автомобіль, залишилось гостре відчуття захоплення процесом створення чогось власного. З віком це бажання не минає, просто масштаби й інструменти змінюються. Коли знайомишся з Arduino – відкривається цілий світ, у якому ти сам задаєш правила. Власний робот – це вже не фантастика і не тільки для «айтішників». Усе, що потрібно – трохи терпіння, бажання вчитися й правильна інструкція. Якщо ти мрієш, щоб твій домашній улюбленець перескакував через перешкоди або збирав сміття, перший крок – навчитися з нуля збирати свого Arduino-робота.
З чого починати: підбір комплектуючих для Arduino-робота
Коли руки тягнуться до заліза, а всередині «чухається» від ідей, спочатку виникає просте питання: що саме потрібно? Асортимент комплектуючих для Arduino-робота вражає – очі розбігаються. Не варто купувати все підряд – стартуємо з базових речей.
Основні компоненти для збірки домашнього робота на Arduino:
- Плата Arduino (Uno, Nano або Mega – залежно від складності проєкту)
- Шасі або платформа-«корпус»
- Два або чотири електродвигуни (з колесами)
- Драйвер для двигунів (наприклад, L298N або L293D)
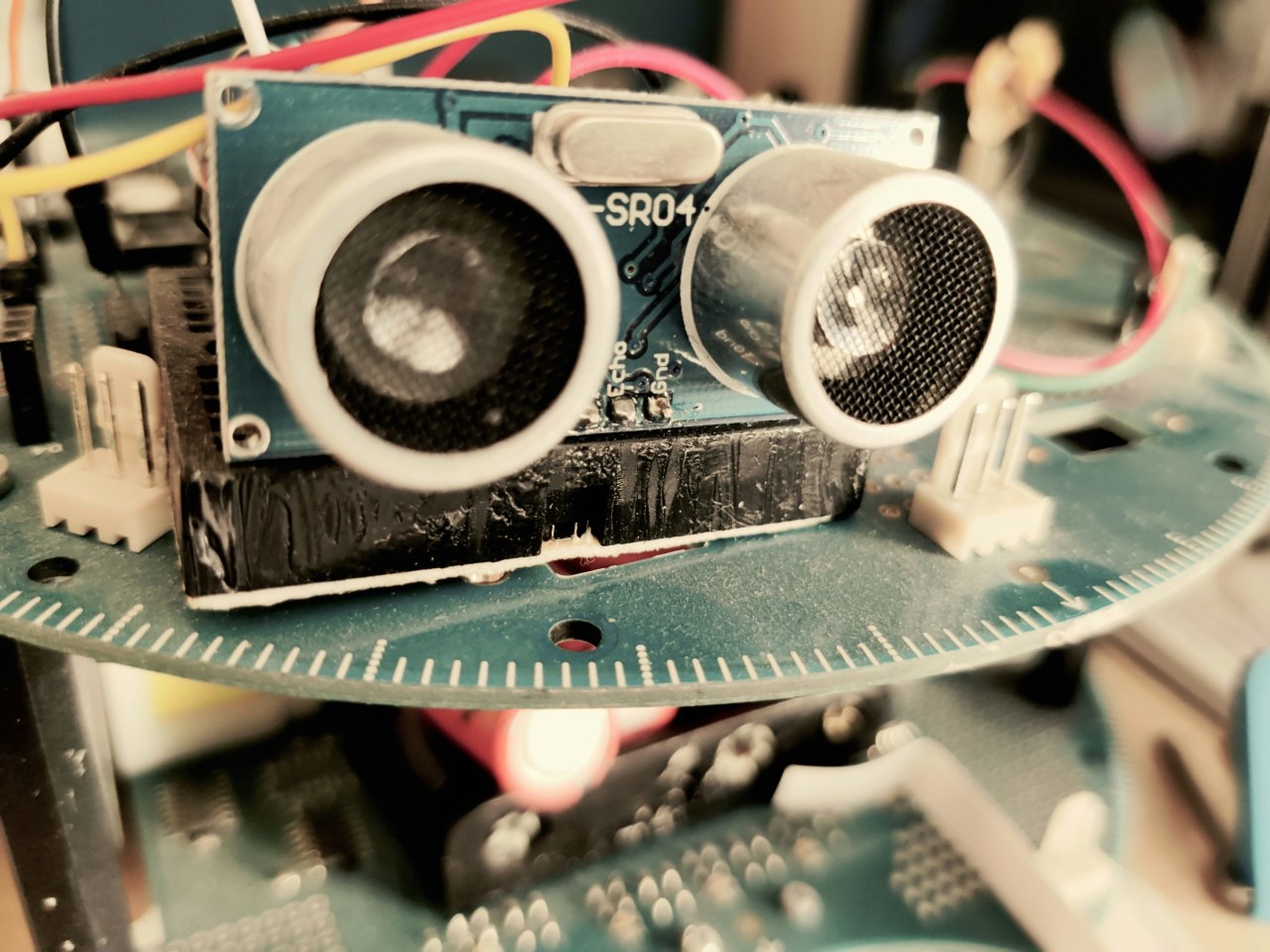
- Датчики (ультразвуковий для визначення відстані, інфрачервоний сенсор для слідування по лінії)
- Джерело живлення (акумулятори або батарейки)
- Провідники, Breadboard (макетна плата), дроти «мама-тато»
- Комплект гвинтиків, гайок та тримачів
Новачки часто намагаються зекономити, купуючи найдешевші деталі з різних магазинів. На практиці це може призвести до нескінченного тестування й «чудових» сюрпризів, коли мотор раптом не витримує навантаження або датчик «глухий». Краще брати перевірені набори – вони не набагато дорожчі, зате економлять нерви й час.
Як зібрати механіку робота на Arduino: поетапний монтаж
Починаємо із найпростіших речей. Збірка шасі – це як складання будинку з фундаменту. Без надійної бази електроніка та коди мало чим допоможуть.
Етапи механічної збірки:
- Платформа: Прикріпи до основи двигуни та колеса, прослідкуй, щоб усе трималося щільно. Гойдаюче шасі – головна причина кривих траєкторій робота.
- Розміщення плати Arduino: Вибери місце, щоб доступ до входів/виходів залишався вільним. Не забувай про ізоляцію – неприємно вкоротити плату на першому ж запуску.
- Драйвер двигунів і сенсори: Зафіксуй драйвер так, щоби його можна було безпечно підключити до моторів і до мозку-«Ардуїно». Датчики монтують спереду (ультразвуковий – «очі»), а, наприклад, сенсор лінії – під шасі.
- Акумулятор: Розташовуй його так, щоби вага рівномірно розподілилася по платформі.
Один знайомий якось зібрав робота, забувши про балансування ваги: він так і їздив колами, поки не перекинувся просто на порозі. Маленький лайфхак: підкладай невеликі гумки чи шматочки поролону під місця з\’єднання – дрібні вібрації глушаться, а деталі не розбовтуються.
Як підключити електроніку в Arduino-роботі без стресу
Найбільший страх у новачків – спалити щось дорогоцінне або заплутатись у дротах. Насправді все не так страшно, коли під рукою є чітка схема підключення для Arduino-робота.
Ось базова логіка підключення:
- Двигуни під’єднуються до драйвера, який контролює їхню роботу.
- Драйвер мотора отримує сигнали управління від Arduino через контактні пін-коди.
- Живлення подається на мотор-водій і Arduino окремо (або через стабілізатор, якщо це один акумулятор).
- Сенсори підключаються до цифрових або аналогових входів Arduino: наприклад, ультразвуковий HC-SR04 зазвичай займає 2-3 пін-коди.
Три помилки, які часто роблять при підключенні електроніки:
- Переплутані полярності (мінус/плюс) – коротке замикання або просто «мовчазний» мотор.
- Недостатньо потужне живлення – плата перезавантажується, а робот гальмує.
- Перебір з кількістю сенсорів без урахування реальних потреб – складно розібратися у проводці, а функціонал не використовується повністю.
Щоб уникнути плутанини, малюй схему навіть на серветці, позначай кольори дротів і не забувай про ізоляцію – це простіше, ніж шукати, чому робот не рухається.
Програмування Arduino-робота: від «Hello, World» до власної логіки
Навіть найкрутіша механіка без коду – це просто розумна іграшка з моторами. Уся магія стається, коли ти пишеш програму і задаєш правила поведінки робота. І тут важливо не боятися складних термінів: базовий скетч для Arduino підйомний навіть для школяра.
Для початку потрібно встановити Arduino IDE – середовище розробки, у якому пишеться код для мікроконтролера. Відомий підхід: «копіюй, змінюй та тестуй». Спочатку – спробуй готовий код із прикладу. Потім поступово додавай свої функції.
Базові кроки для програмування Arduino-робота:
- Налаштуй підключення плати до комп’ютера.
- Скомпілюй та завантаж скетч із простими командами (наприклад, вперед-назад).
- Змусь мотор крутитись за натисканням кнопки або за сигналом з датчика.
- Додай умовні оператори для обходу перешкод або повторення дій за заданим патерном.
Досвідчені майстри часто радять: пробуй «розкласти» усі дії на маленькі функції. Так легше відшукати помилку, якщо щось іде не за планом. Колись один друг так заплутався у своєму коді, що витратив два дні на пошук причини неочікуваних зупинок. Причина була банальна – повторна ініціалізація одного й того ж піну.
Перевірка, тестування й покращення функціоналу Arduino-робота
Перший запуск свого робота – це завжди трішки азарту і трішки страху. Він поїде чи почне диміти? Щоб уникнути зайвих хвилювань, тестуй окремо кожен функціональний блок.
Що спочатку тестувати у своєму Arduino-роботі:
- Роботу кожного мотора окремо (повороти, розгін, гальмування)
- Відгук сенсорів – чи коректно фіксують перешкоди або колір лінії
- Реакцію на команду «Стоп» – щоб уникнути неочікуваних ривків
Коли робот їде прямо без зигзагів і коректно реагує на сигнал із сенсора, можна переходити до складніших завдань: об\’їзд перешкод, патрулювання території, слідкування за лінією. Не біда, якщо все не працює з першого разу. У робототехніці «нескінченне доопрацювання» – це нормальна частина процесу.
Ідеї для прокачування свого Arduino-робота
Один із основних плюсів робототехніки на Arduino – легко змінювати й доповнювати функції. Зібрав класичний «їде вперед – повертає»? Спробуй додати модуль Bluetooth, Wi-Fi або навіть камеру.
Три ідеї для розвитку домашнього Arduino-робота:
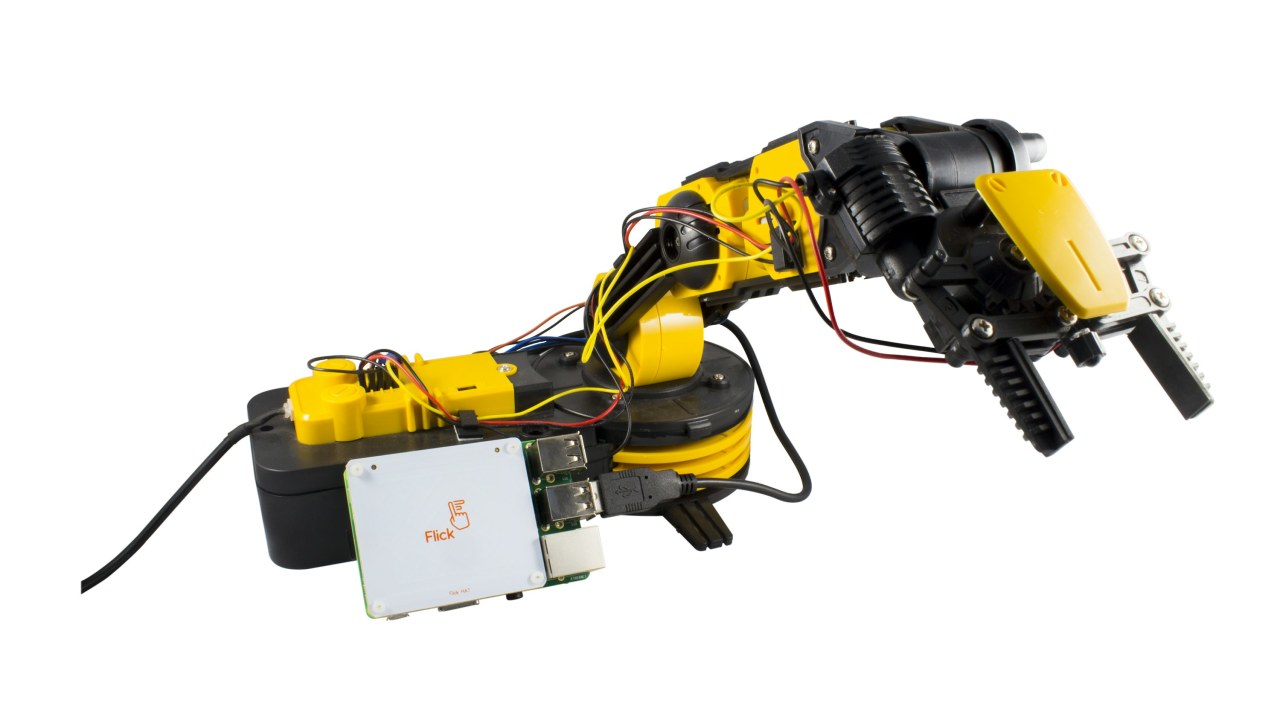
- Додавай серво-приводи для рухомих частин – наприклад, щоб робот міг піднімати предмети.
- Інтегруй додаткові сенсори (газу, температури, вологості) – і от твій робот вже слідкує за мікрокліматом у кімнаті.
- Розробляй власний мобільний додаток для керування або використай голосові команди через популярні сервіси.
Один ентузіаст із Харкова зібрав простого робота-прибиральника, який реагує на звук хлопка долонею й розвертається в інший бік. Ідея проста, реалізація – кілька годин роботи й добрий настрій для всієї родини.
Висновок
Самостійний проєкт на Arduino – це не просто про технічні навички, а про свободу прояву ідей і задоволення від руху вперед. Тут немає невдач – є лише нові кроки в навчанні та досвід, який залишається з тобою. Не бійся експериментувати й помилятися: кожна спроба збирає твого особистого робота не гірше за будь-який куплений комплект. Найцікавіше виникає саме між рядками схеми й у хащі коду. Додавай свої «фішки», дивуй друзів і, головне, кайфуй від результату – робототехніка цінує рішучість і допитливість.







+ There are no comments
Add yours