

Каждый хоть раз видел, как на выставках и в фильмах маленькие роботы бодро катаются по полу, мигают огоньками и даже реагируют на движение: в такие моменты хочется выяснить, насколько сложно сделать что-то подобное самому. И сразу возникают вопросы: получится ли, если нет технического образования? Сколько времени понадобится? Где брать детали? К счастью, сейчас собрать простого робота своими руками – задача вполне реальная даже для школьника или взрослого без инженерного опыта. Главное – разобраться в базовых принципах и не бояться экспериментов.
Несложные роботы на базе доступных комплектующих позволяют быстро войти в мир робототехники, почувствовать себя создателем и лучше понять, как устроены современные электронные устройства. Приятно видеть, как с каждой минутой ваш проект начинает двигаться, издавать звуки, реагировать на препятствия. А еще это отличный способ провести время вместе с детьми или друзьями, развить мышление, моторику, внимание к деталям. Путь от коробки с деталями до работающей модели – самый запоминающийся и увлекательный.
Как выбрать идею для первого робота
Первый шаг – определиться, какой робот будет по силам. Начинающим лучше всего подходит максимально простая конструкция – например, робот, который объезжает препятствия, реагирует на свет или просто движется по прямой линии. Такие устройства не требуют программирования сложных алгоритмов и многокомпонентных схем. Это отличный вариант для самостоятельной сборки дома.
Один из самых популярных примеров – миниатюрная «умная машинка» на двух колесах с ультразвуковым датчиком. Она умеет объезжать предметы на своем пути. Еще один классический вариант – световой трекер, следящий за линией или светом с помощью фоторезисторов. Оба типа просты, но отлично демонстрируют основы робототехники: взаимодействие электроники, механики и датчиков.
Важно понимать, что даже скромный проект даст максимум пользы, если делать его вдумчиво, не торопясь, разбираясь во всех деталях. Успех вдохновит двигаться дальше, пробовать что-то сложнее, подключать дополнительные функции, учиться программировать.
Необходимые компоненты для простого робота
Для успешной сборки понадобятся базовые электронные детали, инструменты и немного терпения. Вот примерный список того, что потребуется для создания несложного робота:
- Микроконтроллер (например, совместимый с популярными платформами для робототехники)
- Плата для прототипирования или макетная плата
- Электродвигатели (обычно используются два – по одному на каждое колесо)
- Колеса
- Держатель для батареек и сами батарейки
- Ультразвуковой или инфракрасный датчик расстояния
- Несколько перемычек или проводов
- Кнопка для включения, индикаторный светодиод (по желанию)
- Корпус или основа (вполне подойдет пластиковая панель или плотный картон)
- Фиксаторы, винты, скотч
Если выбран робот, ориентирующийся на свет, понадобятся фоторезисторы или фотодиоды. Инструменты потребуются самые простые: отвертка, кусачки, паяльник для надежных соединений (или просто макетная плата для тестовой сборки).
Пошаговая инструкция по сборке простого робота
Процесс создания домашнего робота можно представить как серию последовательных шагов: подготовка, сборка механики, подключение электроники и тестирование. Чтобы не запутаться, стоит разделить проект на несколько этапов.
Подготовка деталей и инструментов
Перед началом важно проверить, что все компоненты есть в наличии. Удобнее всего разложить детали на столе, сразу распределить их по назначению. Важно убедиться, что выбранная батарея подходит по напряжению к используемому микроконтроллеру и моторам.
Сборка механической части
- Закрепить двигатели на шасси с помощью винтов или скотча.
- Прикрепить колеса к осям.
- Для устойчивости можно добавить маленький ролик или пластиковую опору.
Если корпус сделан из пластика или картона, все элементы можно закрепить обычным клеем или двухсторонним скотчем. Главное – чтобы колеса свободно вращались и робот не переворачивался.
Подключение электронных компонентов
- Микроконтроллер устанавливается на плату или фиксируется на корпусе.
- К двигателям подключаются провода через драйвер двигателей (если требуется).
- Датчик расстояния располагается на «носу» робота, направлен вперед, подсоединяются его выводы.
- Все провода соединяются согласно схеме – желательно использовать цветные провода для удобства.
- Подключить батарейный отсек, разместить его так, чтобы центр тяжести был ближе к середине робота.
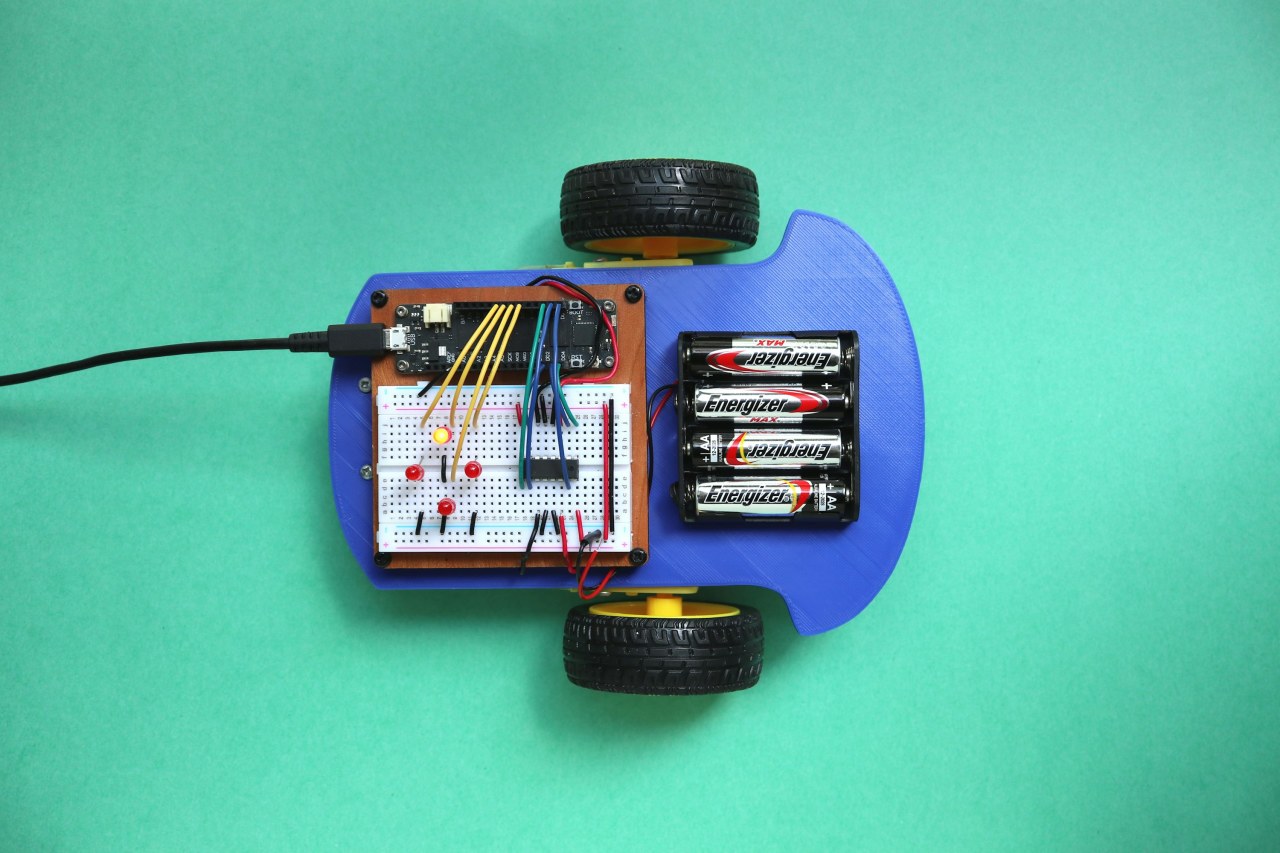
Схема подключения обычно есть в документации к набору или легко находится на специализированных форумах. Если используется макетная плата, провода можно подключать без пайки.
Загрузка программы и проверка работы
Осталось «научить» робота действовать по заданному сценарию. Программа для простейших моделей часто уже готова – ее можно скачать, внеся минимальные изменения, даже если опыта программирования нет.
- Подключить микроконтроллер к компьютеру через кабель.
- Загрузить программу (например, обход препятствий: если датчик фиксирует объект – робот поворачивает).
- Отключить от компьютера, вставить батарейки.
- Включить и протестировать работу: ставим робота на пол, следим за движением, контролируем реакцию на препятствия.
Если робот не реагирует – стоит проверить провода: возможно, один из контактов отошел. Рекомендуется тестировать каждый модуль отдельно, чтобы быстрее находить и устранять неполадки.
Советы по доработке и развитию проекта
Собрав базовую версию, многие хотят добавить что-то свое – сделать модель уникальной, интересной. Для этого стоит рассмотреть пару дополнительных идей:
- Добавить светодиоды для индикации – они могут мигать при поворотах.
- Использовать звук: сигнал при обнаружении препятствия.
- Усовершенствовать механику корпуса, добавив детали из конструктора или 3D-печати.
- Оснастить робота дополнительными датчиками: например, измерять температуру или освещенность.
- Подключить беспроводное управление через Bluetooth или инфракрасный пульт.
Вариантов много, и каждый дополнительный элемент помогает лучше понимать, как работает электроника, почему важны правильные подключения и баланс питания. Если хочется двигаться дальше – стоит попробовать собрать робота, способного рисовать, танцевать, следовать за рукой или реагировать на голосовые команды.
Типичные ошибки и как их избежать
Новички часто сталкиваются с несколькими типичными трудностями:
- Неверное подключение проводов – один из самых частых промахов. Даже опытные иногда путают полярность или порядок выводов.
- Недостаточно прочная сборка – робот начинает разваливаться во время движения.
- Перегрузка микроконтроллера: слишком много компонентов, не рассчитан источник питания.
- Отсутствие тестирования поэтапно: если начать проверять только после полной сборки, искать ошибку сложнее.
Чтобы не тратить много времени на устранение мелких неполадок, имеет смысл проверять работу каждого элемента отдельно, использовать схемы и делать фотографии этапов сборки. Так и инструкции будут понятнее, и разбирать конструкцию в случае доработки станет проще.
Польза и возможности самостоятельно собранного робота
Самостоятельная сборка даже самого простого робота – это не только увлекательный опыт, но и отличный способ развить техническое мышление, внимательность, творческий подход. Такой проект помогает на практике понять основы работы датчиков, моторов и управляющей электроники, познакомиться с принципами электрических цепей. А еще – подарить себе чувство гордости от первого работающего изобретения.
Практика показывает: один успешный проект часто становится началом целой серии новых идей и экспериментов. Постепенно появляется желание осваивать программирование, усложнять алгоритмы, создавать роботов для решения более сложных задач. И независимо от возраста или профессии, процесс остается одинаково захватывающим.
Главное – не бояться начинать, пробовать новые подходы и учиться на собственных ошибках. В мире робототехники всегда найдется место для смелых идей и пытливых умов.












+ There are no comments
Add yours